Raspberry Pi Pico - Force Sensor
This guide shows you how to use a force sensor with a Raspberry Pi Pico. We will learn:
- How a force sensor works
- How to connect the force sensor with Raspberry Pi Pico
- How to write MicroPython script for Raspberry Pi Pico to read data from the force sensor
Hardware Preparation
Or you can buy the following kits:
| 1 | × | DIYables Sensor Kit (18 sensors/displays) |
Additionally, some of these links are for products from our own brand, DIYables .
Overview of Force Sensor

The force sensor, also known as a force sensing resistor, force sensitive resistor, or just FSR, changes its resistance when pressure is applied.
- Low cost and easy to use.
- Good at detecting physical pressure or compression.
- Not good for measuring weight in pounds.
The force sensor is found in electronic drums, mobile phones, handheld gaming devices, and various other small electronic devices.
Pinout
A force sensor comes with two pins. Since it functions as a resistor, it is not necessary to distinguish between these pins. They are the same.
How It Works
The force sensor works like a resistor that adjusts its resistance depending on how strongly it is pressed. If you press harder, the resistance between the two ends decreases.
Wiring Diagram
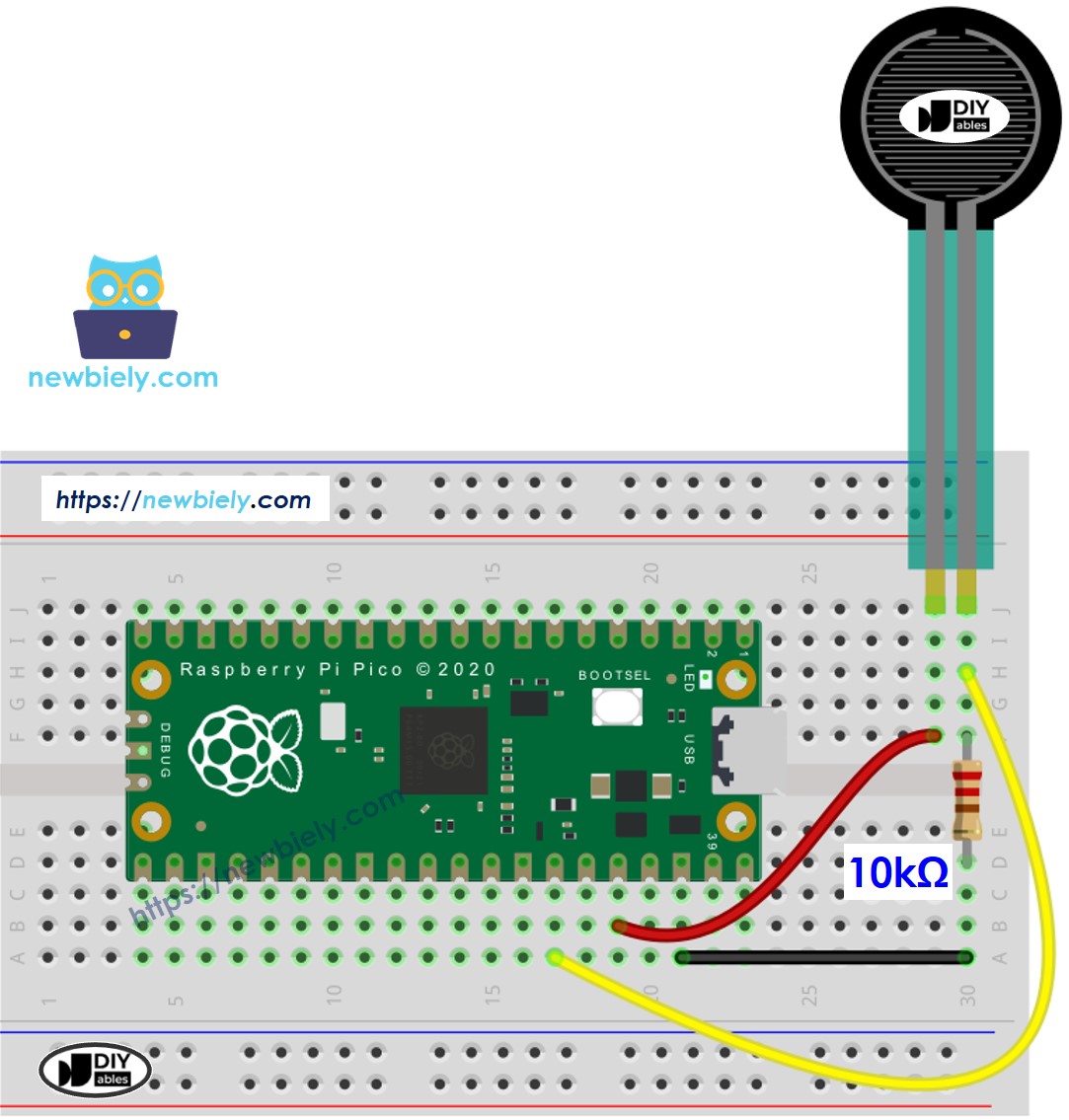
This image is created using Fritzing. Click to enlarge image
Raspberry Pi Pico Code
Detailed Instructions
Please follow these instructions step by step:
- Ensure that Thonny IDE is installed on your computer.
- Ensure that MicroPython firmware is installed on your Raspberry Pi Pico.
- If this is your first time using a Raspberry Pico, refer to the Raspberry Pi Pico - Getting Started tutorial for detailed instructions.
- Connect the force sensor to the Raspberry Pi Pico according to the provided diagram.
- Connect the Raspberry Pi Pico to your computer using a USB cable.
- Launch the Thonny IDE on your computer.
- On Thonny IDE, select MicroPython (Raspberry Pi Pico) Interpreter by navigating to Tools Options.
- In the Interpreter tab, select MicroPython (Raspberry Pi Pico) from the drop-down menu.
- Ensure the correct port is selected. Thonny IDE should automatically detect the port, but you may need to select it manually (e.g., COM3 on Windows or /dev/ttyACM0 on Linux).
- Copy the above code and paste it to the Thonny IDE's editor.
- Save the script to your Raspberry Pi Pico by:
- Click the Save button, or use Ctrl+S keys.
- In the save dialog, you will see two sections: This computer and Raspberry Pi Pico. Select Raspberry Pi Pico
- Save the file as main.py
- Click the green Run button (or press F5) to run the script. The script will execute.
- Press on the force sensor.
- Check out the message in the Shell at the bottom of Thonny.
Please note that the value from the sensor may vary. It is recommended to calibrate for each force level.
If you name your script main.py and save it to the root directory of the Raspberry Pi Pico, it will automatically run each time the Pico is powered on or reset. This is useful for standalone applications that need to start running immediately upon power-up. If you name your script another name other than main.py, you will need to manually run it from Thonnys's Shell.