Arduino UNO Q - Ultrasonic Sensor
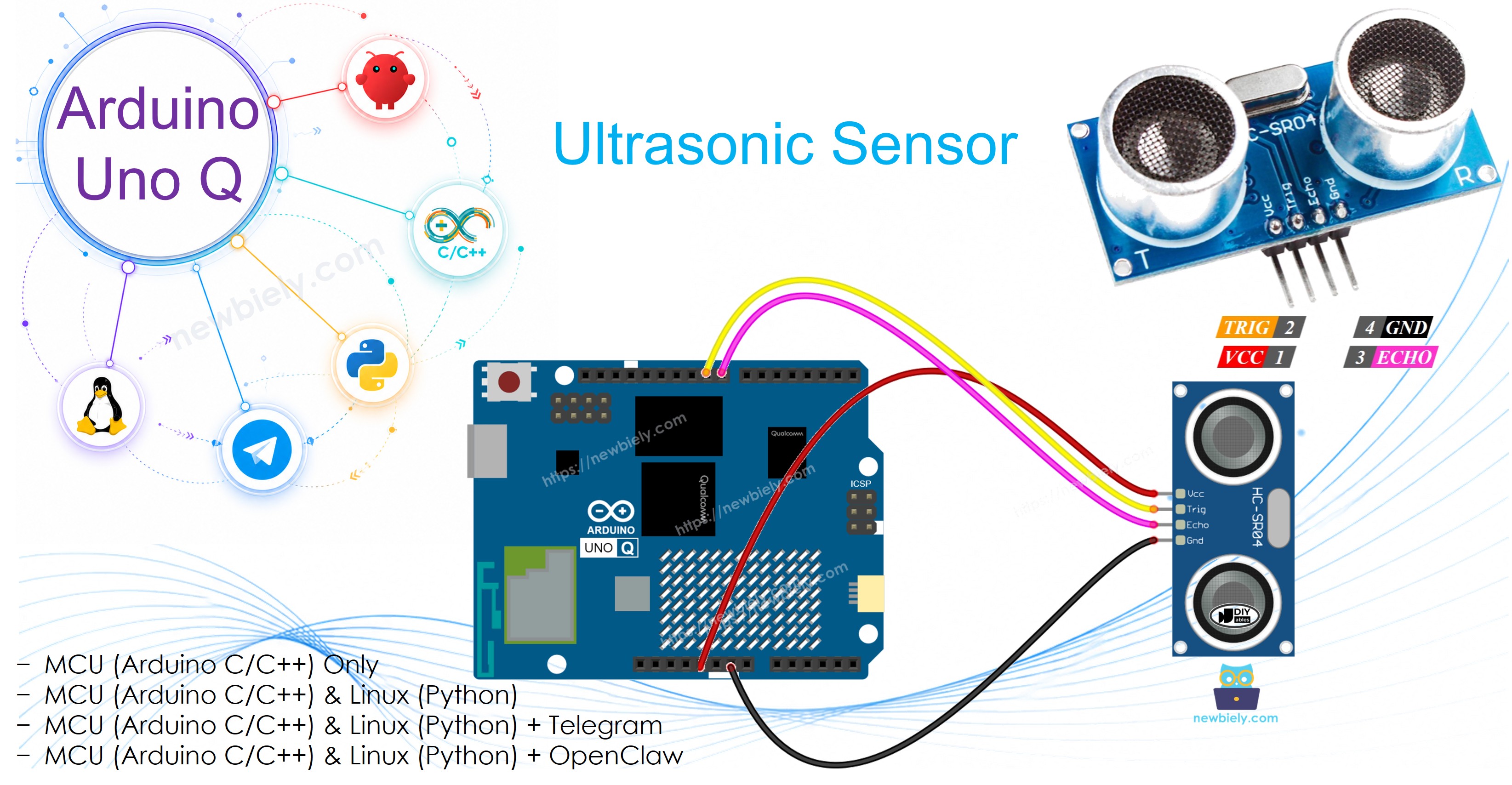
This tutorial shows you how to use an Arduino UNO Q with an HC-SR04 ultrasonic sensor to measure distance to an object. You will learn:
- How to connect an ultrasonic sensor to an Arduino UNO Q
- How to program the MCU to read distance values
- How to filter noise from distance measurements
- How to use the Bridge to read distance from Linux and display it via Monitor
- How to read distance remotely over Telegram
Hardware Preparation
Or you can buy the following kits:
| 1 | × | DIYables Sensor Kit (18 sensors/displays) |
Additionally, some of these links are for products from our own brand, DIYables .
Overview of Ultrasonic Sensor
The HC-SR04 ultrasonic sensor measures the distance to objects using sound waves. It sends out a sound wave that humans cannot hear, then listens for the echo when the sound bounces back. By measuring the round-trip time, the sensor calculates distance.
Pinout
The HC-SR04 has four pins:
- VCC pin: Connect to VCC (5V).
- GND pin: Connect to GND (0V).
- TRIG pin: Connect to an MCU output pin to trigger a measurement pulse.
- ECHO pin: Connect to an MCU input pin to receive the echo pulse duration.

Wiring Diagram
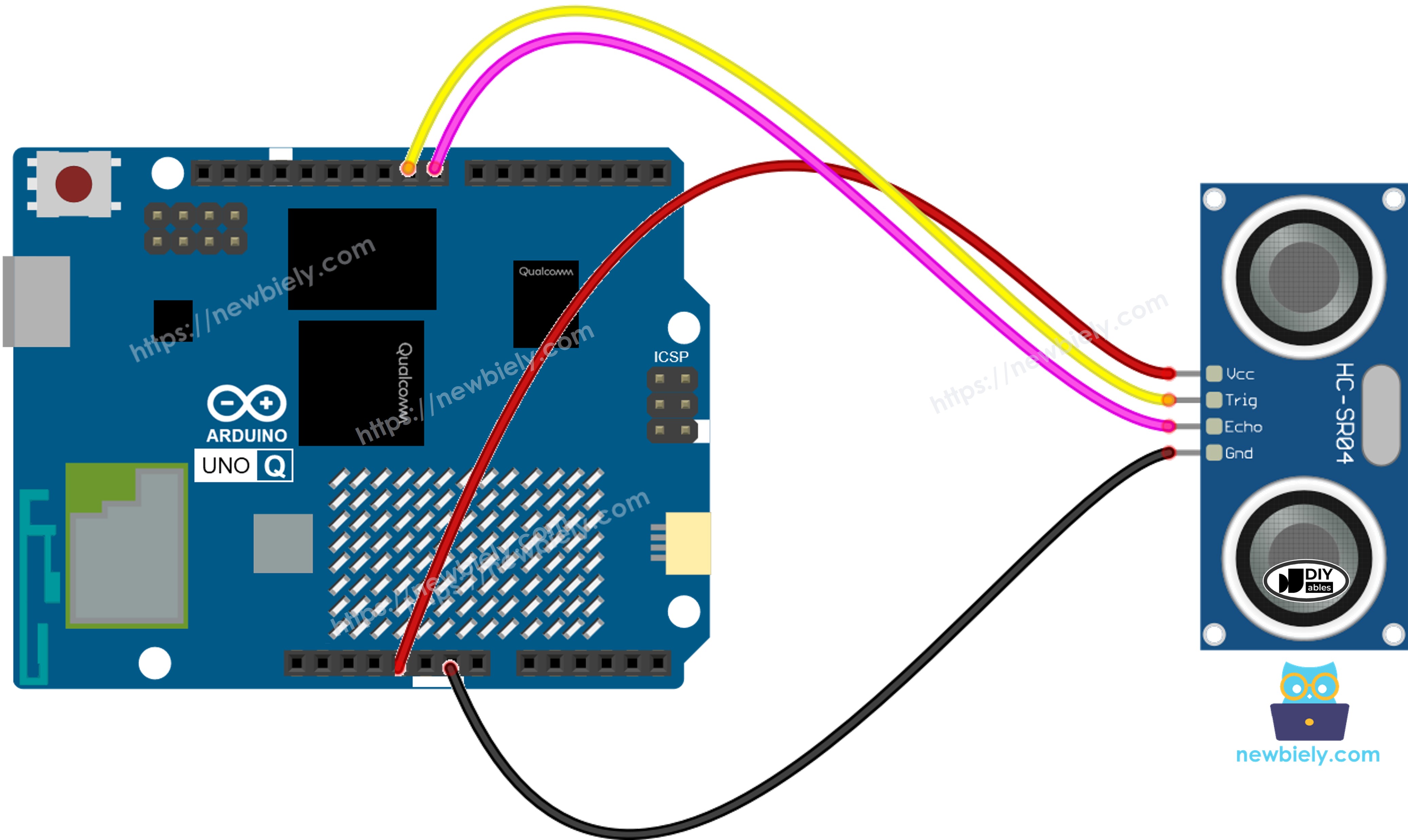
This image is created using Fritzing. Click to enlarge image
MCU Code
The Arduino UNO Q has two processors: the STM32 MCU (handles real-time hardware control) and the Qualcomm MPU (runs Debian Linux). In this section, only the STM32 MCU is programmed — the Linux side stays idle. A later section will show how both processors work together.
Detailed Instructions
- First time with Arduino UNO Q? Follow the Getting Started with Arduino UNO Q tutorial to get your development environment ready before proceeding.
- Wire the components: Connect VCC → 5V, GND → GND, TRIG → pin 9, ECHO → pin 8.
- Connect: Plug the Arduino UNO Q into your computer with a USB-C cable.
- Open Arduino App Lab: Launch Arduino App Lab and wait until it detects your Arduino UNO Q.
- Create a new App: Click the Create New App button.
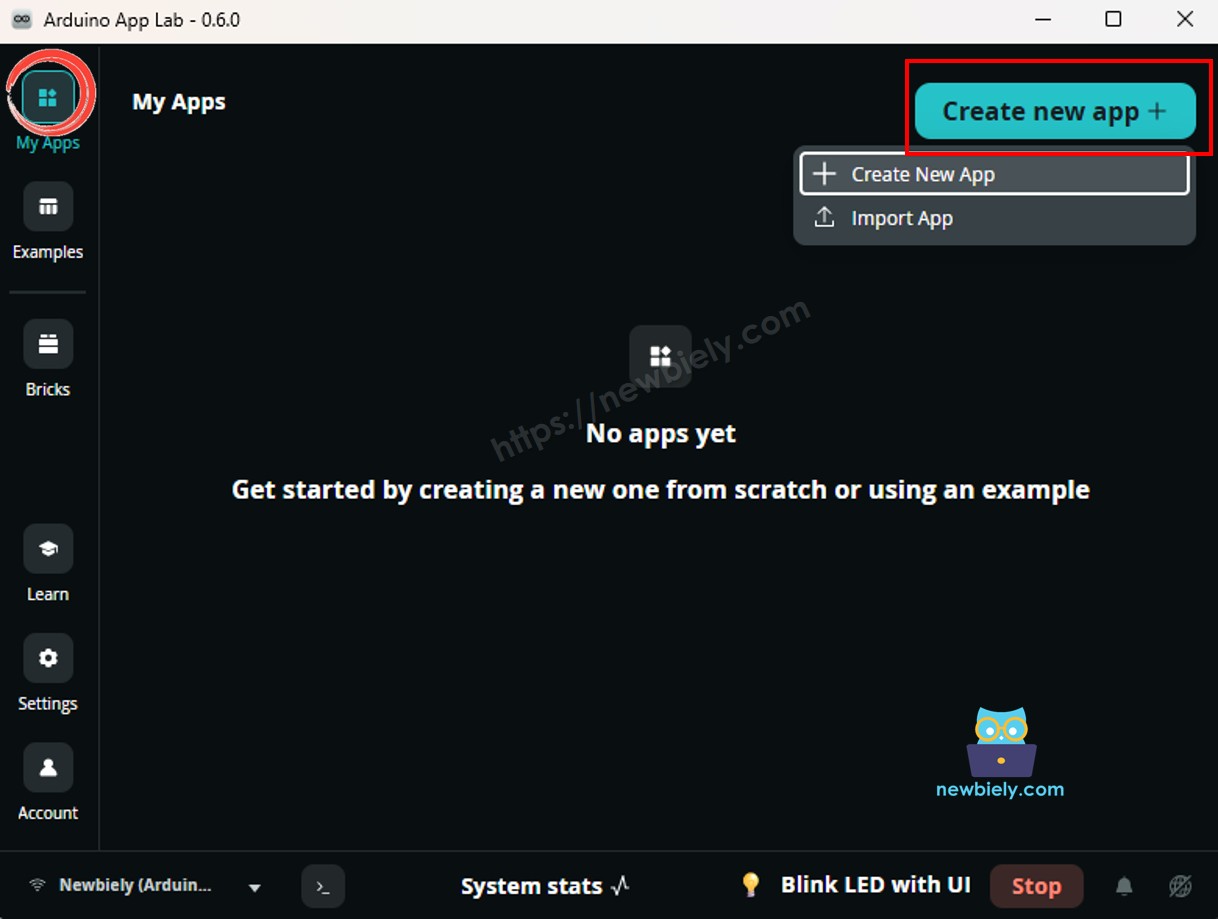
- Give the App a name, for example: DIYables_Ultrasonic
- Click Create to confirm.
- You will see a set of folders and files generated inside your new App.
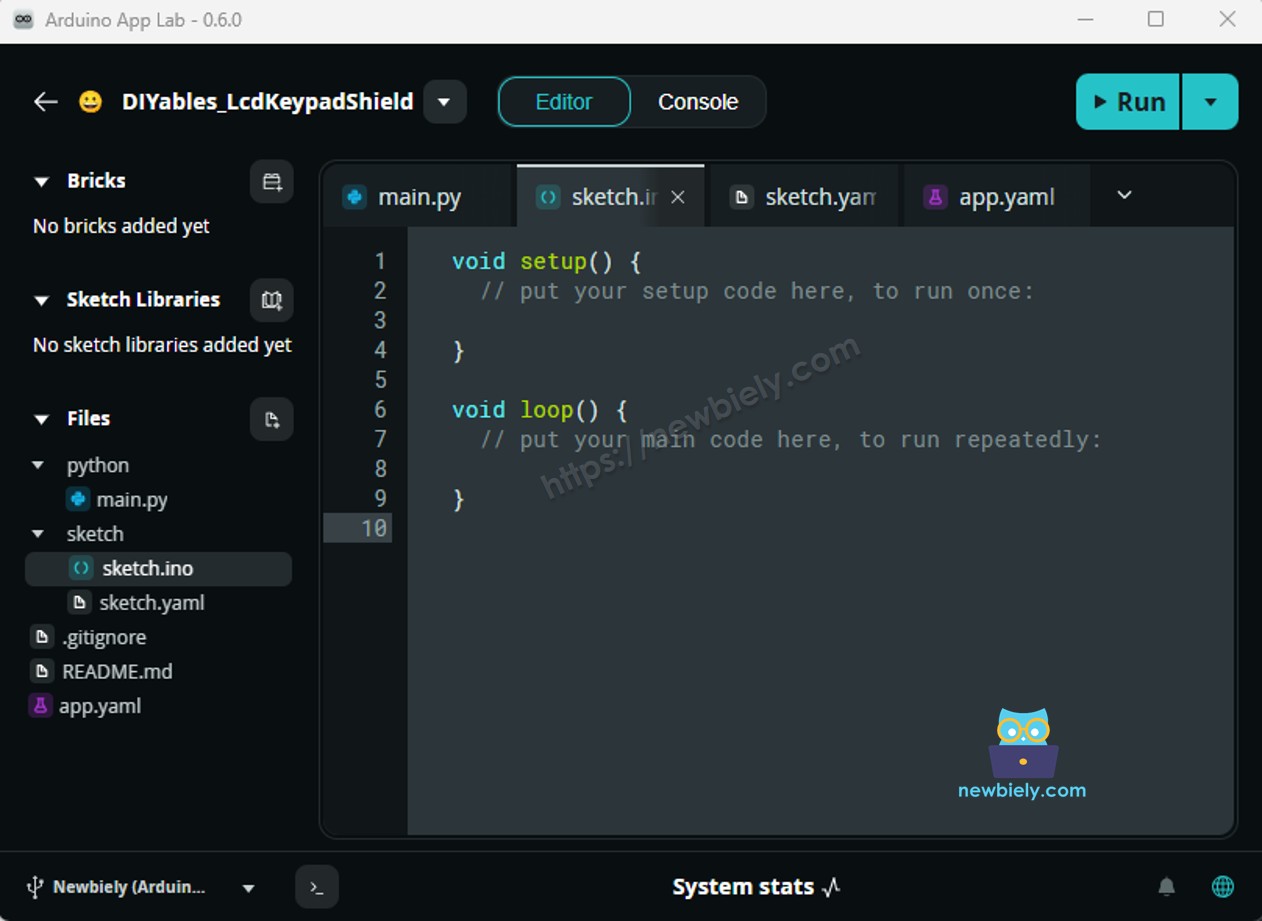
- Find the sketch/sketch.ino file — this is where you will paste the MCU sketch.
- Install the library: Click the Add sketch library button (the open book icon with a + sign) in the left sidebar.
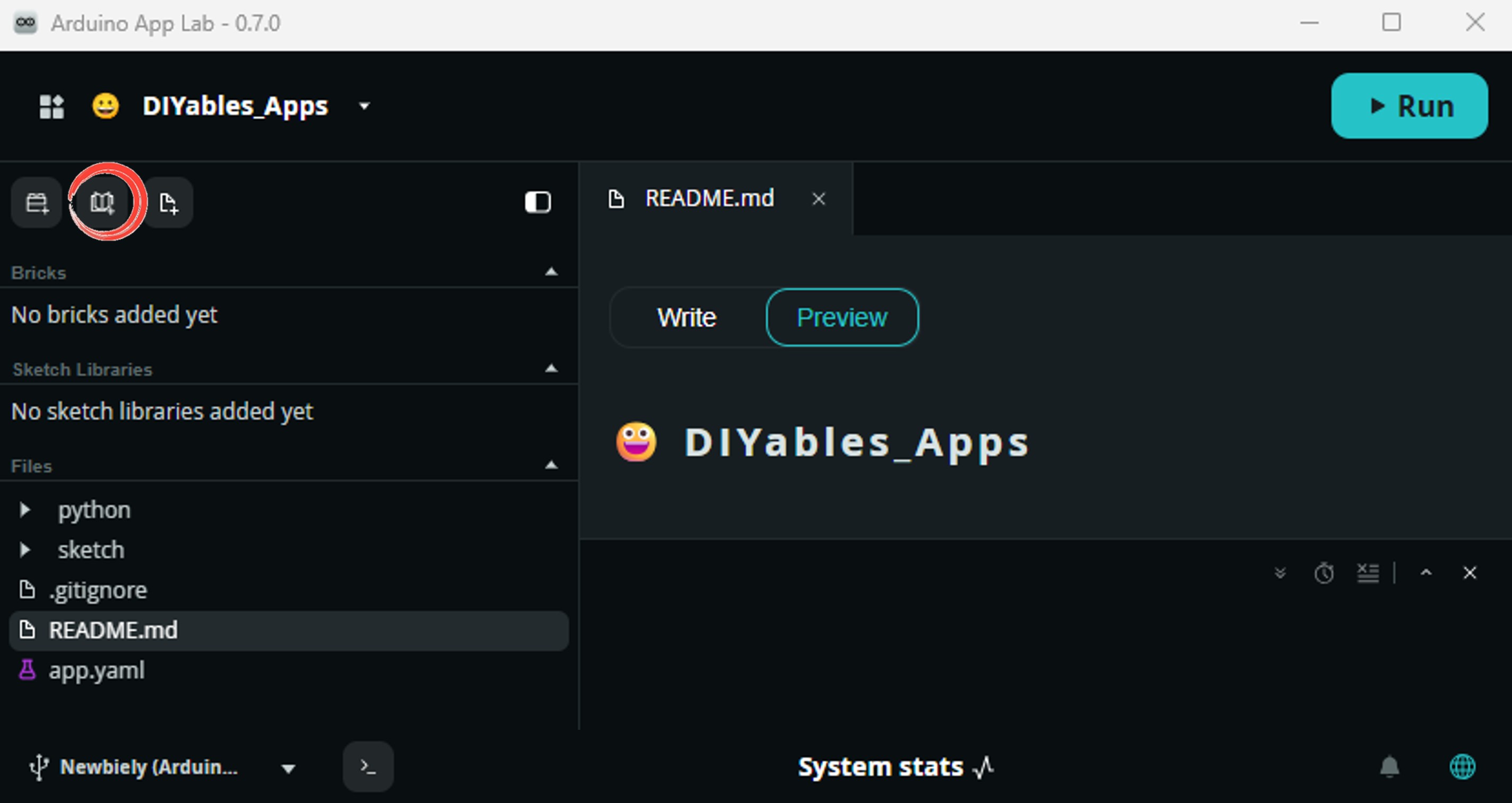
- Search for Arduino_RouterBridge created by Arduino and click the Install button.
- Upload: Click the Run button in Arduino App Lab to compile and upload to the STM32.
- Test: Wave your hand in front of the sensor. Use the Bridge section below to see the distance readings via Monitor.
How to Filter Noise from Ultrasonic Measurements
Distance readings from the HC-SR04 include noise. In some applications, noisy data can cause incorrect behavior. Use this method to filter it:
- Take 20 measurements and store them in an array.
- Sort the array from smallest to largest.
- Remove the 5 smallest and 5 largest values (treated as noise).
- Average the remaining 10 middle values.
Linux + MCU Bridge Programming
The Arduino UNO Q has two processors that work together: the MPU (Qualcomm, runs Debian Linux) and the MCU (STM32, runs Zephyr OS with your Arduino sketch). They communicate using RPC via the Arduino_RouterBridge library — never via raw serial ports.
- The ultrasonic sensor is connected to the MCU (STM32) — TRIG on pin 9, ECHO on pin 8.
- The MPU cannot read the sensor directly — it calls Bridge.call("read_distance") on the MCU, which triggers a measurement and prints the result to Monitor.
- The MPU has Wi-Fi — because the MPU runs full Debian Linux with Wi-Fi, it can receive Telegram commands and send readings remotely.
- Communication: Bridge.call() on the Linux side invokes Bridge.provide_safe() on the MCU side (since digitalWrite() is used to trigger the TRIG pulse)
- ⚠️ Reserved: /dev/ttyHS1 (Linux) and Serial1 (MCU) are used by the Arduino Router — never open them directly
In short: MPU requests reading → MCU measures distance → MCU prints result to Monitor.
MCU sketch — ultrasonic sensor with Bridge and Monitor output:
Python script (Arduino App Lab) — request distance reading from Linux every second:
- Note: Make sure Bridge.begin() is called in the MCU sketch and the sketch is uploaded before running the Python script on the Linux side.
- ⚠️ Warning: Never directly open /dev/ttyHS1 (on Linux) or use Serial1 (on MCU) in your code — these are reserved by the Arduino Router and accessing them will break the Bridge.
Detailed Instructions
- Upload the MCU sketch: Open Arduino App Lab, create a new App, paste the Bridge MCU sketch into sketch/sketch.ino, install the Arduino_RouterBridge library, and click Run.
- Add the Python script: Paste the Python code above into the Python tab of the same App.
- Run the App: Click Run — Python requests a distance reading every second.
- Check the console: Open the Console tab → MCU Monitor subtab to see the distance values.
App Lab Console Output
Telegram Integration
Read the ultrasonic sensor remotely from anywhere via Telegram.
If you do not have a Telegram bot yet, see How to Create a Telegram Bot to get your bot token before continuing.
MCU sketch: Keep the same MCU sketch from the previous Bridge section — no changes needed. Make sure it is already uploaded and running on the STM32 before proceeding.
Python script (Arduino App Lab) — Telegram bot for ultrasonic distance reading:
- Note: Replace YOUR_BOT_TOKEN with the token obtained from @BotFather on Telegram.
- Send /read — the MCU measures the distance and the bot replies with the value in cm.
Detailed Instructions
- Upload the MCU sketch: Use the Bridge MCU sketch from the previous section (upload it first if not already done).
- Paste the Telegram script: Copy the Python code above into the Python tab of your App in Arduino App Lab.
- Set your token: Replace YOUR_BOT_TOKEN in the script with your actual bot token.
- Run the App: Click Run — the bot starts listening for Telegram messages.
- Test it: Send /read — the bot replies with the measured distance in cm.
App Lab Console Output

ArduinoBot
OpenClaw Integration
You can adapt the OpenClaw to this tutorial by refering the instruction on Arduino Uno Q - OpenClaw Tutorial
Ultrasonic Sensor Applications
- Collision avoidance
- Level detection (water tank, grain silo)
- Proximity sensing
- Object counting on a conveyor belt
- Parking distance assistant
Challenge Yourself
- Easy: Add a threshold — print "Object nearby!" when distance drops below 10 cm
- Medium: Send the actual distance value (in cm) directly back to the Telegram user
- Advanced: Implement the noise filter from the section above inside the Bridge MCU sketch and compare filtered vs raw readings via Monitor