Raspberry Pi - TCS3200D/TCS230 Color Sensor
This comprehensive guide shows you how to connect the TCS3200D/TCS230 color sensor to Raspberry Pi for precise color measurement and RGB value extraction. Master calibration procedures and develop color recognition capabilities in your projects.
Learning objectives:
- Establishing connections between TCS3200D/TCS230 and Raspberry Pi
- Executing sensor calibration to eliminate environmental noise
- Developing Raspberry Pi programs for RGB color measurement
Hardware Preparation
Or you can buy the following kits:
| 1 | × | DIYables Sensor Kit (18 sensors/displays) |
Additionally, some of these links are for products from our own brand, DIYables .
Overview of TCS3200D/TCS230 Color Sensor
The TCS3200D/TCS230 sensor utilizes a photodiode matrix arranged in an 8×8 grid for color detection through optical filtering. Within this 64-element array, 16 photodiodes feature red spectral filters, another 16 use green filters, 16 employ blue filters, and the remaining 16 operate without filters (clear response). Color measurement happens by activating specific filter sets and analyzing the resulting frequency-modulated square-wave output.
Built-in white LED arrays on typical modules deliver constant illumination to targets, maintaining reading stability regardless of external lighting variations and enhancing performance in dim environments.
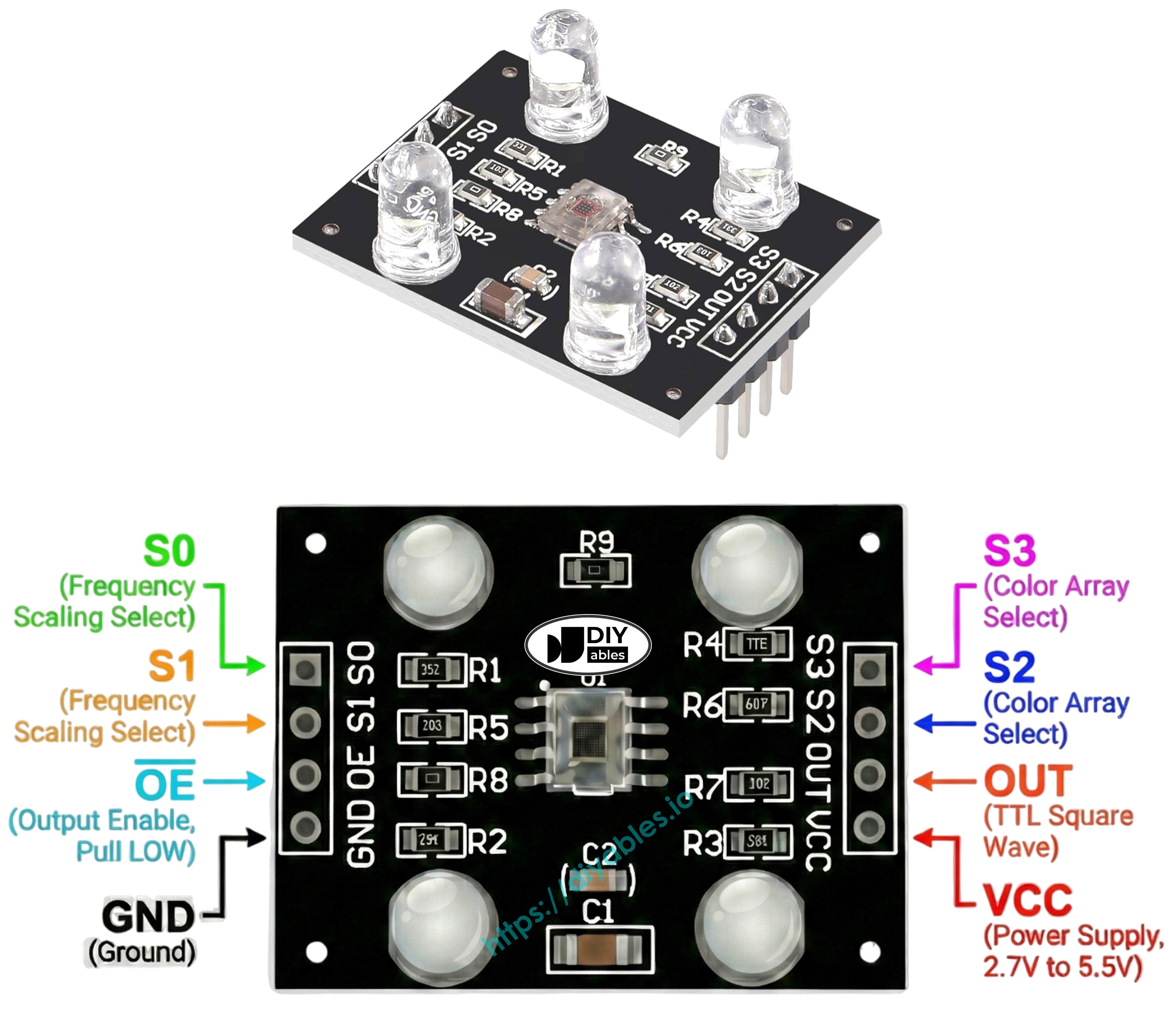
Pinout
Available connections on the TCS3200D/TCS230 sensor board:
- VCC pin: Supply voltage input (+5V).
- GND pin: Ground reference (0V).
- S0, S1 pins: Output frequency scaling selectors.
- S2, S3 pins: Color channel filter selectors.
- OUT pin: Frequency-modulated square wave output.
- OE pin: Output enable input (enables when LOW). Standard modules typically hard-wire this to GND internally. If not connected, manually wire to GND.
How It Works
Two critical settings control sensor behavior: which color channel to activate and what output signal strength to generate. Two pairs of control inputs manage these functions:
Frequency scaling control (S0 and S1 pins):
- S0=LOW, S1=LOW: Power down state
- S0=LOW, S1=HIGH: 2% scaling factor
- S0=HIGH, S1=LOW: 20% scaling factor
- S0=HIGH, S1=HIGH: 100% scaling factor (full speed)
Color channel selection (S2 and S3 pins):
- S2=LOW, S3=LOW: Red photodiodes active
- S2=LOW, S3=HIGH: Blue photodiodes active
- S2=HIGH, S3=LOW: Clear photodiodes active (no filtering)
- S2=HIGH, S3=HIGH: Green photodiodes active
The OUT pin delivers square-wave frequencies spanning approximately 2 Hz to 500 kHz range. Frequency increases with light intensity—brighter illumination produces higher frequency output. By measuring pulse duration (which correlates inversely—shorter durations indicate stronger light), we can translate these measurements into conventional 0-255 RGB format through calibration.
Achieving Optimal Precision
- Keep sensor positioned 1-3 cm from measurement target with stable angular alignment.
- Utilize integrated white LED illumination for repeatable lighting.
- Shield sensor from variable ambient light to enhance measurement consistency.
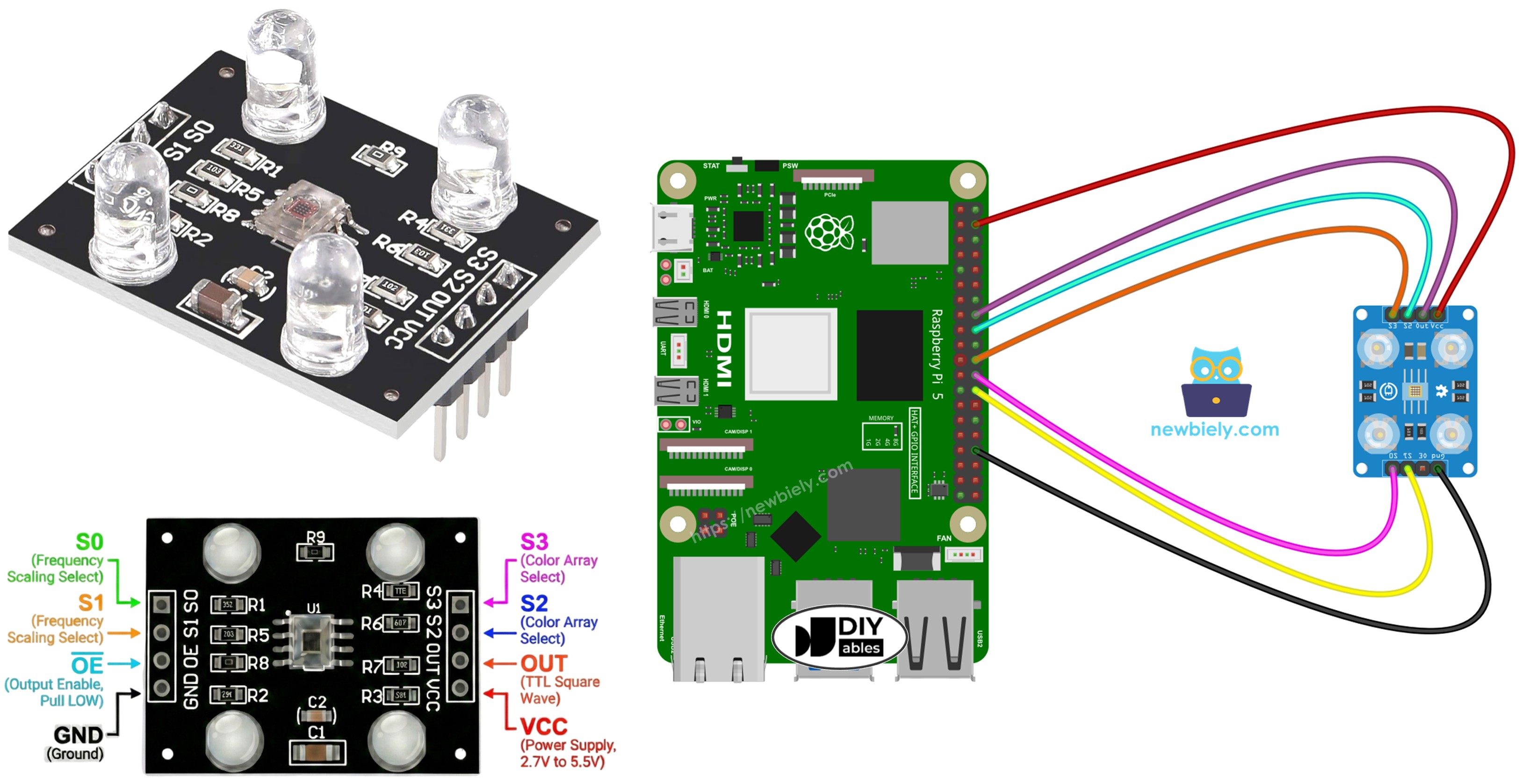
Wiring Diagram
TCS3200 color sensor to Raspberry Pi wiring configuration:
| TCS3200 Color Sensor | Raspberry Pi |
|---|---|
| VCC | 5V |
| GND | GND |
| OUT | GPIO23 |
| S0 | GPIO8 |
| S1 | GPIO7 |
| S2 | GPIO24 |
| S3 | GPIO25 |
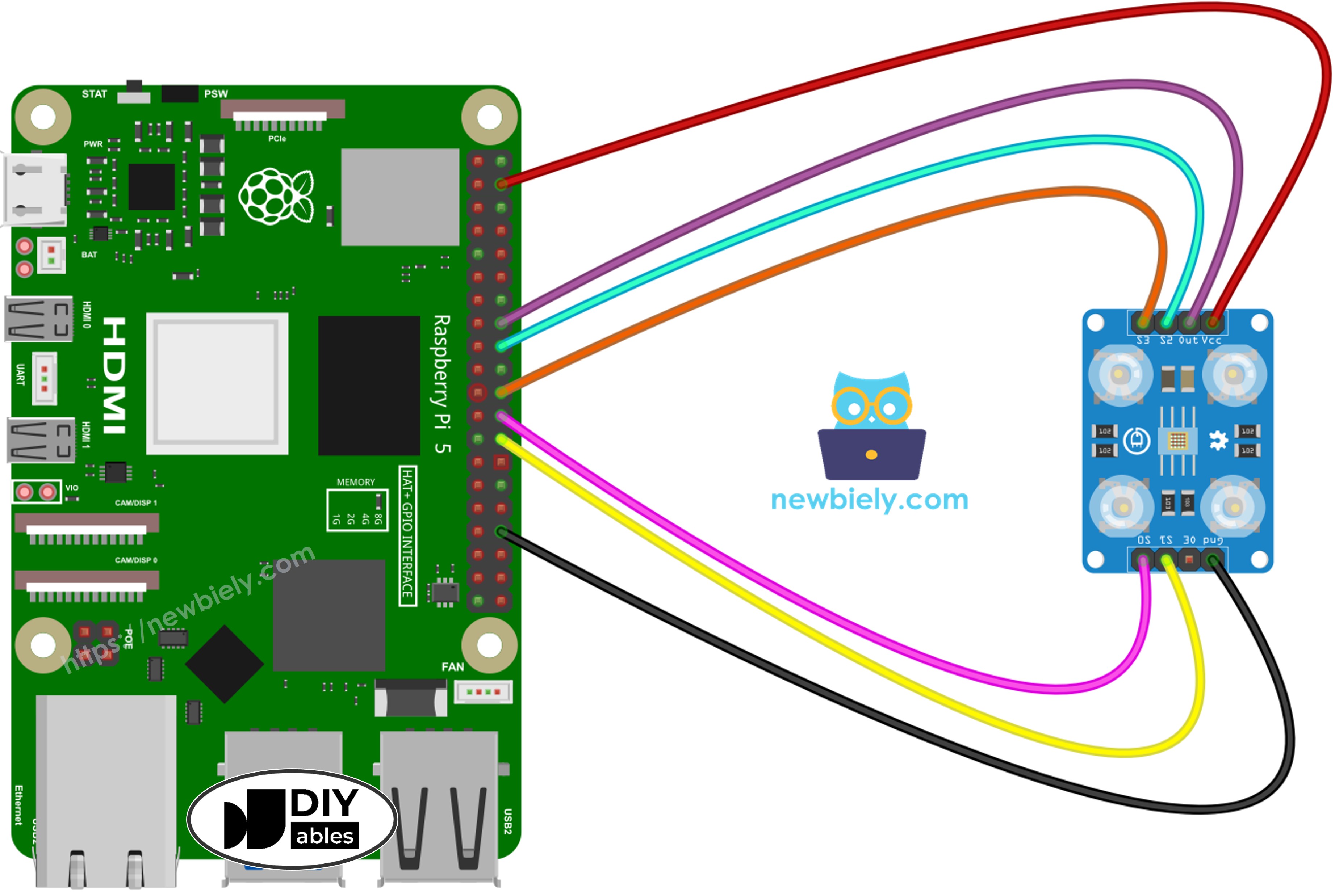
This image is created using Fritzing. Click to enlarge image
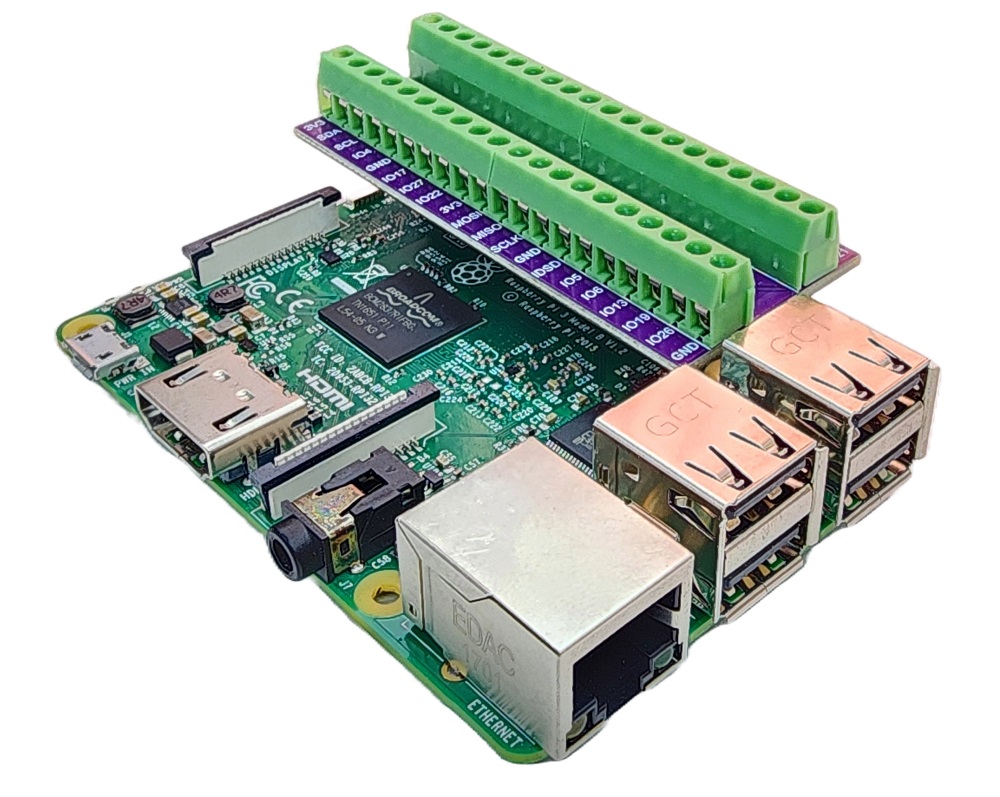
To simplify and organize your wiring setup, we recommend using a Screw Terminal Block Shield for Raspberry Pi. This shield ensures more secure and manageable connections, as shown below:
Raspberry Pi Code - Pulse Width Calibration
Calibration eliminates environmental interference from raw measurements. Variables including LED output strength, target spacing, material reflectivity, and room lighting all affect readings. Think of these as systematic errors requiring measurement. The calibration routine identifies minimum and maximum pulse widths across all color channels, establishing reference boundaries for converting raw data into accurate 0–255 RGB values matched to your deployment environment.
Detailed Instructions
- Copy the code and save it to a file, for example, tcs3200_calibration.py
- Run the script:
- Expose sensor to diverse surfaces: white materials (printer paper), black objects, plus multi-colored items
- Watch Min/Max boundaries update automatically as extremes are detected
- Once values stabilize (generally 10-20 seconds), press Ctrl+C to stop
- Document all six calibration parameters displayed
Sample calibration parameters extracted from above output:
- RedMin = 42, redMax = 210
- GreenMin = 55, greenMax = 185
- BlueMin = 60, blueMax = 172
Raspberry Pi Code - RGB Value Measurement
Detailed Instructions
- Identify calibration variables at code start:
- Substitute all six zero placeholders with measured calibration data. Example using values redMin = 42, redMax = 210, greenMin = 55, greenMax = 185, blueMin = 60, blueMax = 172:
- Save the updated code to a file, for example, tcs3200_sensor.py
- Run the script:
- Arrange colored sample before sensor
- Check RGB output in the terminal
Displayed RGB values conform to standard 0-255 scaling. Reduced pulse widths (indicating brighter reflections) generate higher RGB outputs; extended pulse widths (dimmer reflections) yield lower values.
Project Applications
With operational RGB measurement capability, you can develop:
- Chromatic sorting system: Categorize objects by color (red/green/blue differentiation)
- Color verification device: Confirm color consistency between samples
- Colored path follower: Robots that navigate along chromatic markers
- Visual quality inspection: Detect production defects via color analysis
- Color-triggered automation: Execute actions when specific hues are detected