Arduino Nano ESP32 - Potentiometer Servo Motor
This tutorial instructs you how to use Arduino Nano ESP32 to control the angle of a servo motor based on the input value from a potentiometer. In detail, we will learn:
- How to connect the potentiometer and servo motor to Arduino Nano ESP32
- How to program Arduino Nano ESP32 to read the value from a potentiometer and control a servo motor accordingly.
Hardware Preparation
Or you can buy the following kits:
| 1 | × | DIYables Sensor Kit (18 sensors/displays) |
Disclosure: Some of the links provided in this section are Amazon affiliate links. We may receive a commission for any purchases made through these links at no additional cost to you.
Additionally, some of these links are for products from our own brand, DIYables .
Additionally, some of these links are for products from our own brand, DIYables .
Buy Note: For controlling multiple servo motors, use the PCA9685 16 Channel PWM Servo Driver Module to save MCU pins and simplify wiring.
Overview of Servo Motor and Potentiometer
If you are unfamiliar with servo motors and potentiometers, including pinout, functioning, and programming, the following tutorials will be helpful:
Wiring Diagram
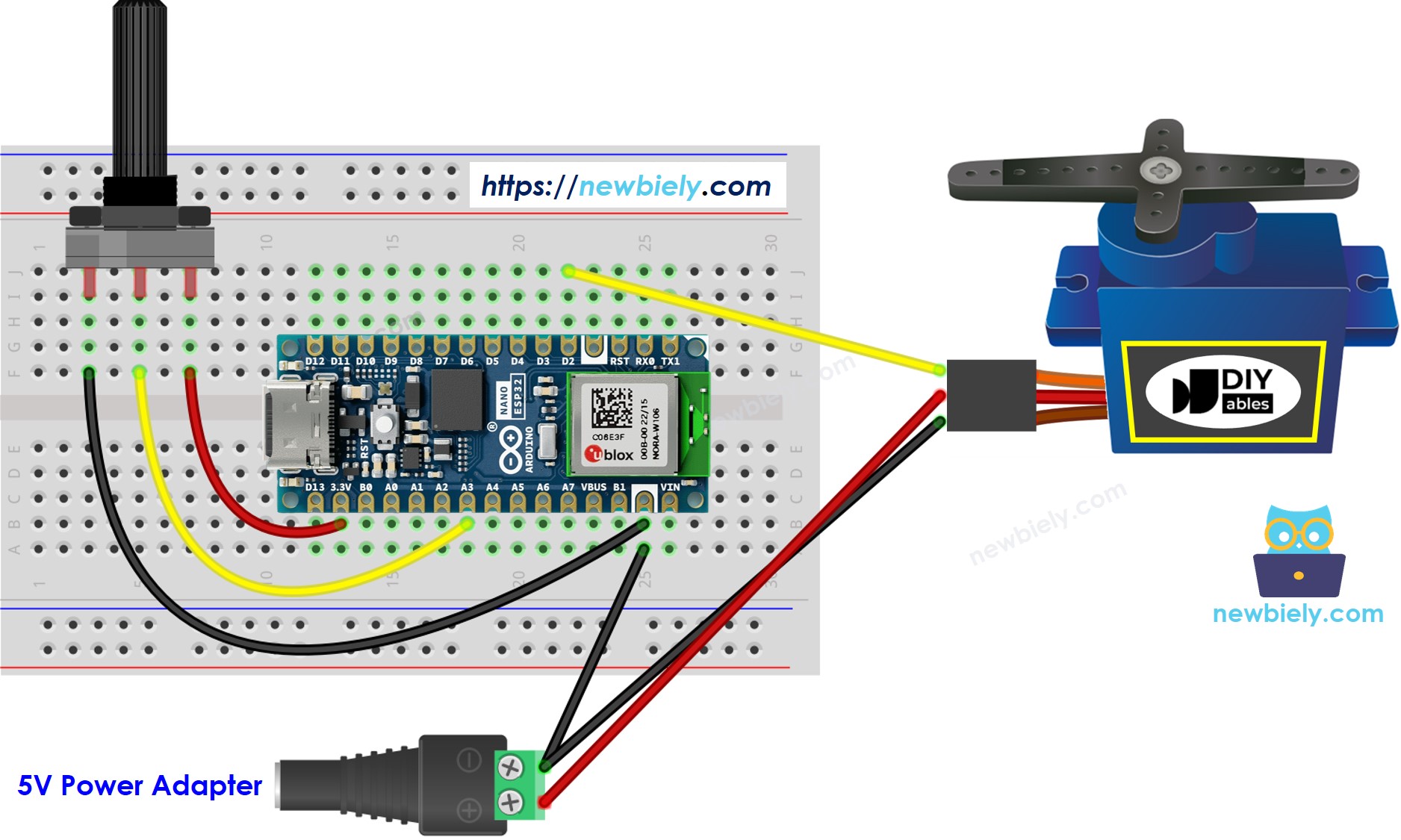
This image is created using Fritzing. Click to enlarge image
How To Program
- Read the value from the potentiometer (ranging from 0 to 1023)
int analog_value = analogRead(A3);
- Convert it it to an angle in the range of 0 to 180.
int angle = map(analog_value, 0, 1023, 0, 180);
- Control the servo to the specified angle.
servo.write(angle);
Arduino Nano ESP32 Code
/*
* This Arduino Nano ESP32 code was developed by newbiely.com
*
* This Arduino Nano ESP32 code is made available for public use without any restriction
*
* For comprehensive instructions and wiring diagrams, please visit:
* https://newbiely.com/tutorials/arduino-nano-esp32/arduino-nano-esp32-potentiometer-servo-motor
*/
#include <ESP32Servo.h>
#define PIN_POTENTIOMETER A3 // The Arduino Nano ESP32 pin connected to potentiometer
#define PIN_SERVO D2 // The Arduino Nano ESP32 pin connected to servo motor
Servo servo; // create servo object to control a servo
void setup() {
// initialize serial communication at 9600 bits per second:
Serial.begin(9600);
// set the ADC attenuation to 11 dB (up to ~3.3V input)
analogSetAttenuation(ADC_11db);
servo.attach(PIN_SERVO); // attaches the Arduino Nano ESP32 pin to the servo object
}
void loop() {
// reads the value of the potentiometer (value between 0 and 4095)
int analogValue = analogRead(PIN_POTENTIOMETER);
// scales it to use it with the servo (value between 0 and 180)
int angle = map(analogValue, 0, 4095, 0, 180);
// sets the servo position according to the scaled value
servo.write(angle);
// print out the value
Serial.print("Analog value: ");
Serial.print(analogValue);
Serial.print(" => Angle: ");
Serial.println(angle);
delay(100);
}
Detailed Instructions
- If you are new to Arduino Nano ESP32, refer to the tutorial on how to set up the environment for Arduino Nano ESP32 in the Arduino IDE.
- Wire the components as shown in the diagram.
- Connect the Arduino Nano ESP32 board to your computer using a USB cable.
- Open Arduino IDE on your computer.
- Choose the Arduino Nano ESP32 board, and its respective COM port.
- Copy the code above and open it in the Arduino IDE.
- Click the Upload button in the Arduino IDE to transfer the code to the Arduino Nano ESP32.

- Open the Serial Monitor
- Turn the potentiometer
- Check out the servo motor's rotation
- View the result in the Serial Monitor
8
Serial.println("Hello World!");
Message (Enter to send message to 'Arduino Nano ESP32' on 'COM15')
New Line
9600 baud
Analog: 0, Angle: 0
Analog: 85, Angle: 14
Analog: 201, Angle: 35
Analog: 286, Angle: 50
Analog: 370, Angle: 65
Analog: 444, Angle: 78
Analog: 521, Angle: 91
Analog: 608, Angle: 106
Analog: 690, Angle: 121
Analog: 793, Angle: 139
Analog: 907, Angle: 159
Analog: 1023, Angle: 180
Analog: 1023, Angle: 180
Code Explanation
Check out the line-by-line explanation contained in the comments of the source code!