Arduino UNO R4 - DIYables Bluetooth App Rotator
Overview
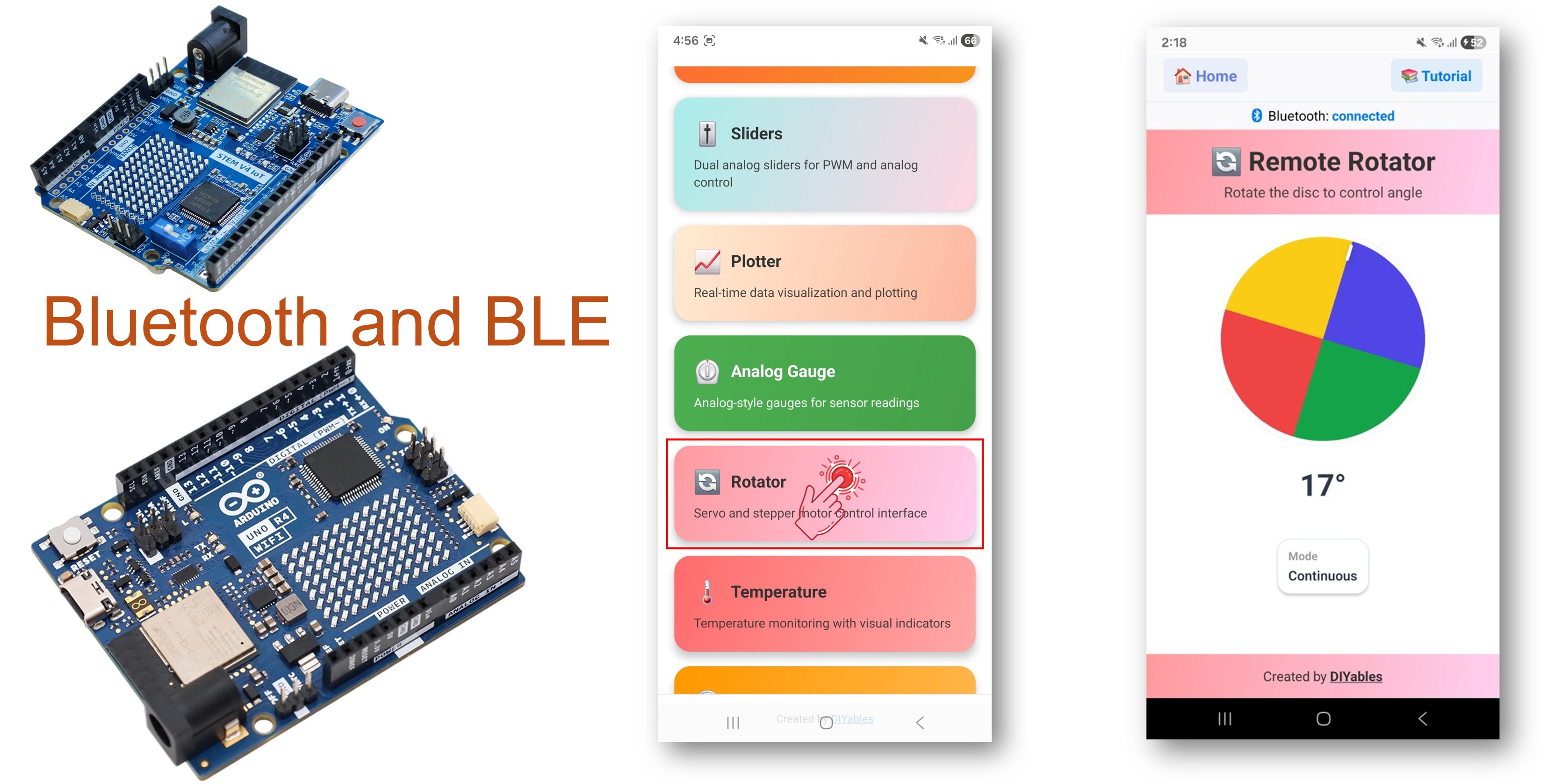
The Bluetooth Rotator example provides angular position control through the DIYables Bluetooth STEM app. Designed for Arduino UNO R4 WiFi using BLE (Bluetooth Low Energy) to control rotation angles and servo motors wirelessly from your smartphone. Supports limited-range and continuous rotation modes. Perfect for servo control, robotics, pan-tilt mechanisms, and angular positioning.
Note: The Arduino UNO R4 WiFi only supports BLE (Bluetooth Low Energy). It does not support Classic Bluetooth. The DIYables Bluetooth App supports both BLE and Classic Bluetooth on Android, and BLE on iOS. Since this board uses BLE, the app works on both Android and iOS.
Features
- Limited Mode: Set min/max angle range (e.g., 0° to 180°)
- Continuous Mode: Full 360° continuous rotation
- Real-Time Angle: Receive angle updates as user rotates
- Servo Integration: Direct servo motor control
- Initial Angle Sync: Send current position on connect
- Works on Android & iOS: BLE is supported on both platforms
- No Pairing Required: BLE auto-connects without manual pairing
Hardware Preparation
Or you can buy the following kits:
| 1 | × | DIYables STEM V4 IoT Starter Kit (Arduino included) | |
| 1 | × | DIYables Sensor Kit (18 sensors/displays) |
Additionally, some of these links are for products from our own brand, DIYables .
Buy Note: For controlling multiple servo motors, use the PCA9685 16 Channel PWM Servo Driver Module to save MCU pins and simplify wiring.
Arduino UNO R4 WiFi Code
Detailed Instructions
Follow these instructions step by step:
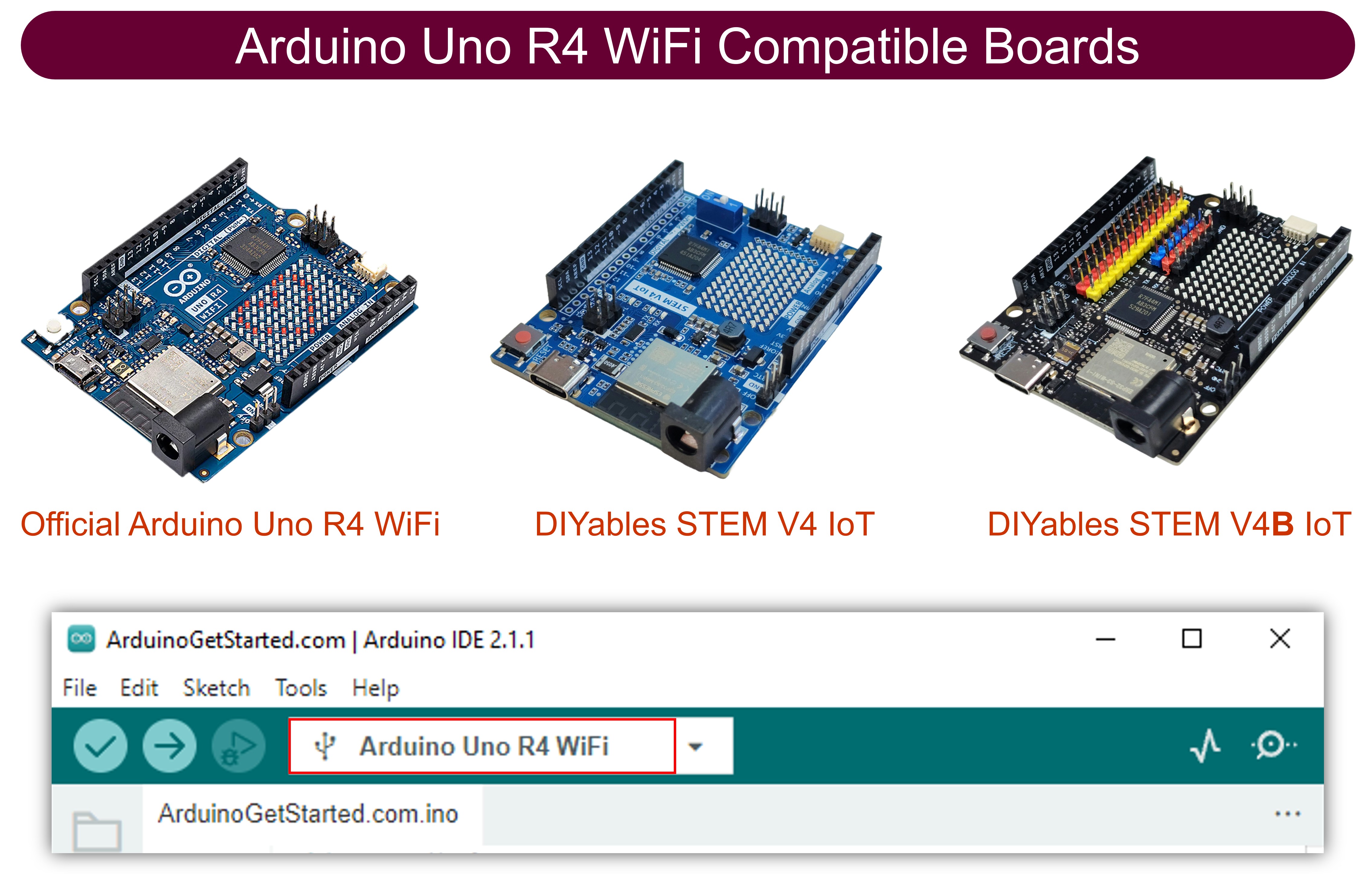
- If this is your first time using the Arduino UNO R4 WiFi, refer to the Arduino UNO R4 WiFi getting started guide.
- Connect the Arduino UNO R4 WiFi board to your computer using a USB cable.
- Launch the Arduino IDE on your computer.
- Select Arduino UNO R4 WiFi board and the appropriate COM port.
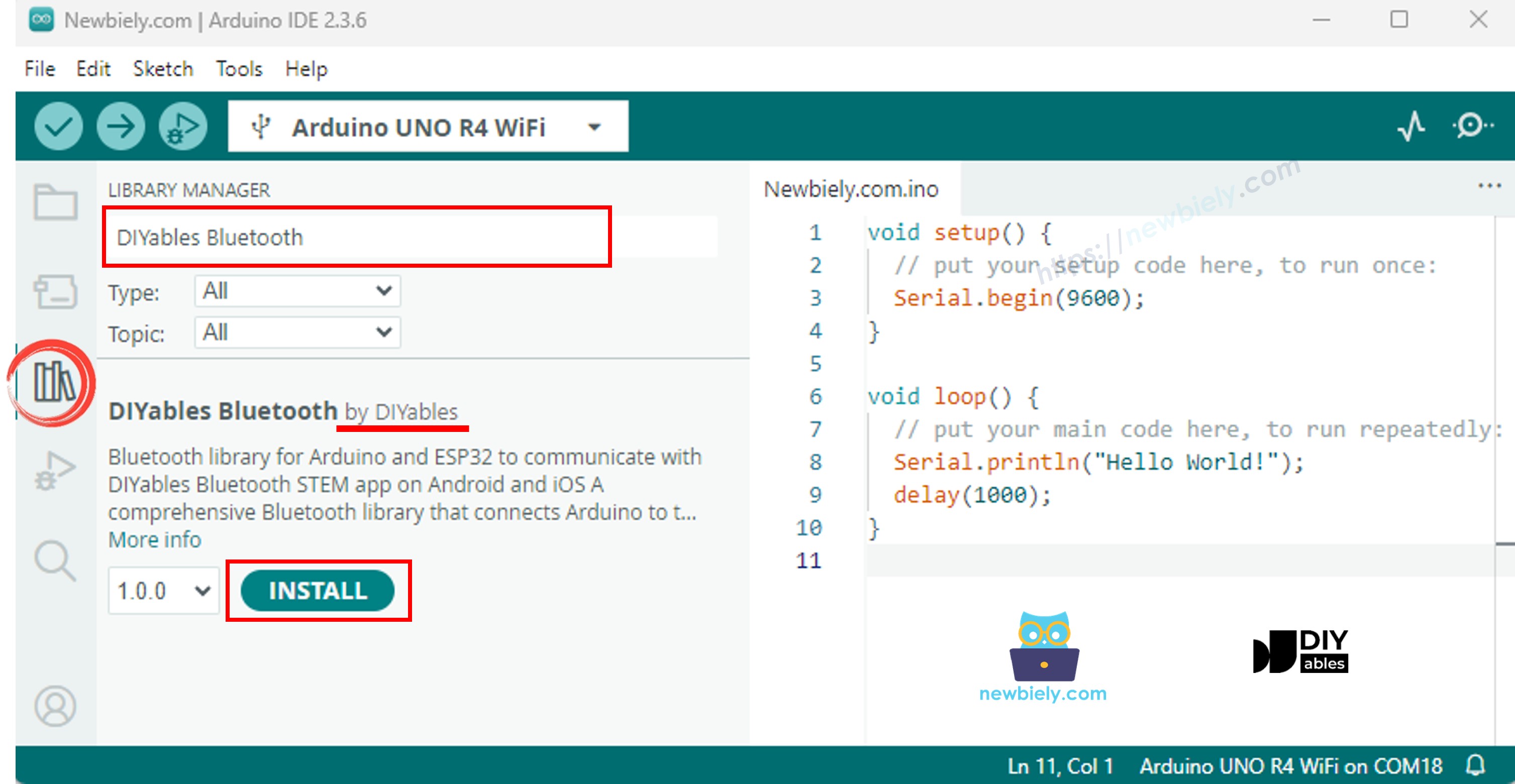
- Navigate to the Libraries icon on the left bar of the Arduino IDE.
- Search "DIYables Bluetooth", then find the DIYables Bluetooth library by DIYables
- Click Install button to install the library.
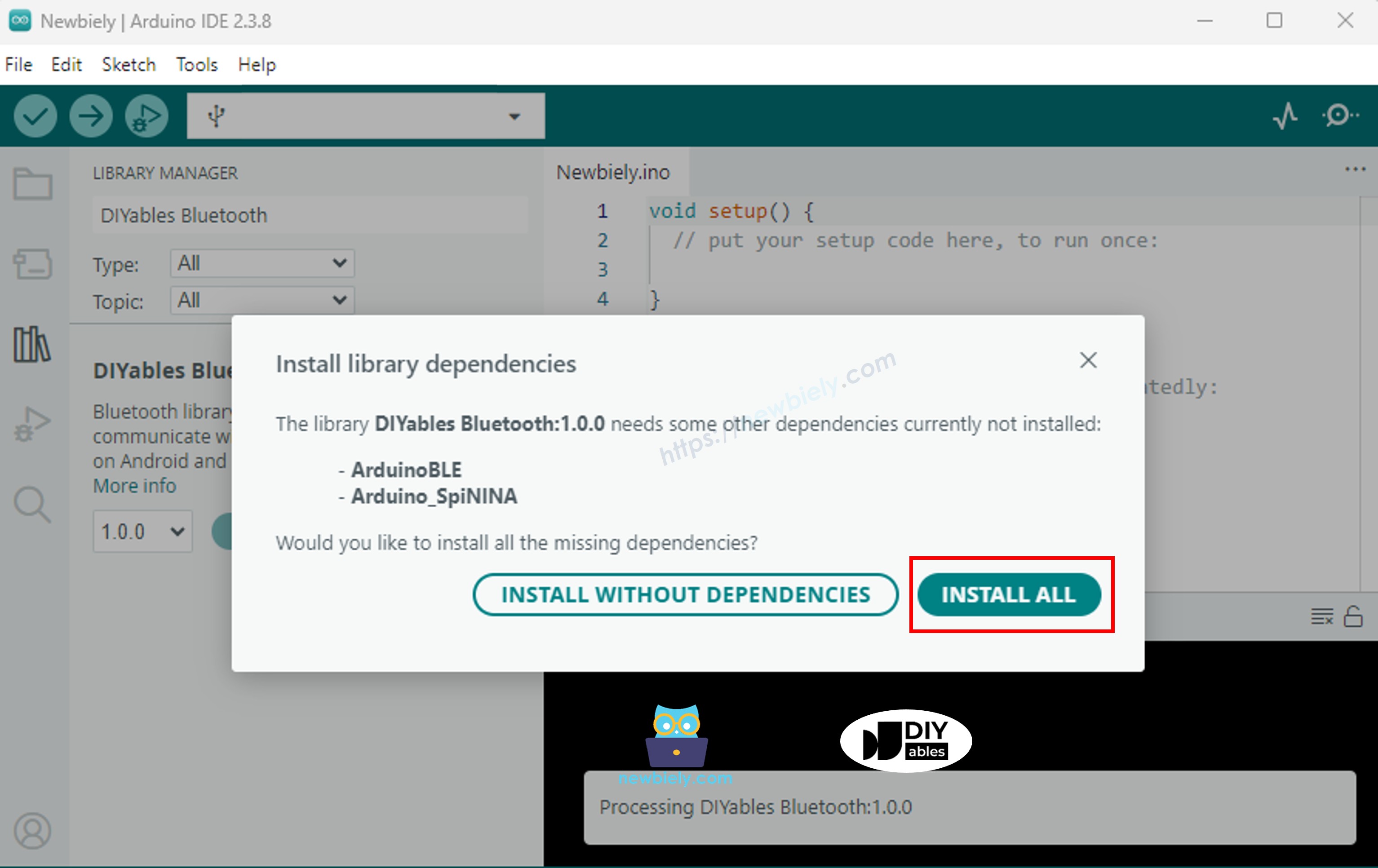
- You will be asked for installing some other library dependencies
- Click Install All button to install all library dependencies.
BLE Code
- On Arduino IDE, Go to File Examples DIYables Bluetooth ArduinoBLE_Rotator example, or copy the above code and paste it to the editor of Arduino IDE
- Click Upload button on Arduino IDE to upload code to Arduino UNO R4 WiFi
- Open the Serial Monitor
- Check out the result on Serial Monitor. It looks like the below:
Mobile App
Note: The DIYables Bluetooth App supports both BLE and Classic Bluetooth on Android, and BLE on iOS. Since the Arduino UNO R4 WiFi uses BLE, the app works on both Android and iOS. No manual pairing is needed for BLE — just scan and connect.
- Open the DIYables Bluetooth App
- When opening the app for the first time, it will ask for permissions. Please grant the following:
- Nearby Devices permission (Android 12+) / Bluetooth permission (iOS) - required to scan and connect to Bluetooth devices
- Location permission (Android 11 and below only) - required by older Android versions to scan for BLE devices
- Make sure Bluetooth is turned on on your phone
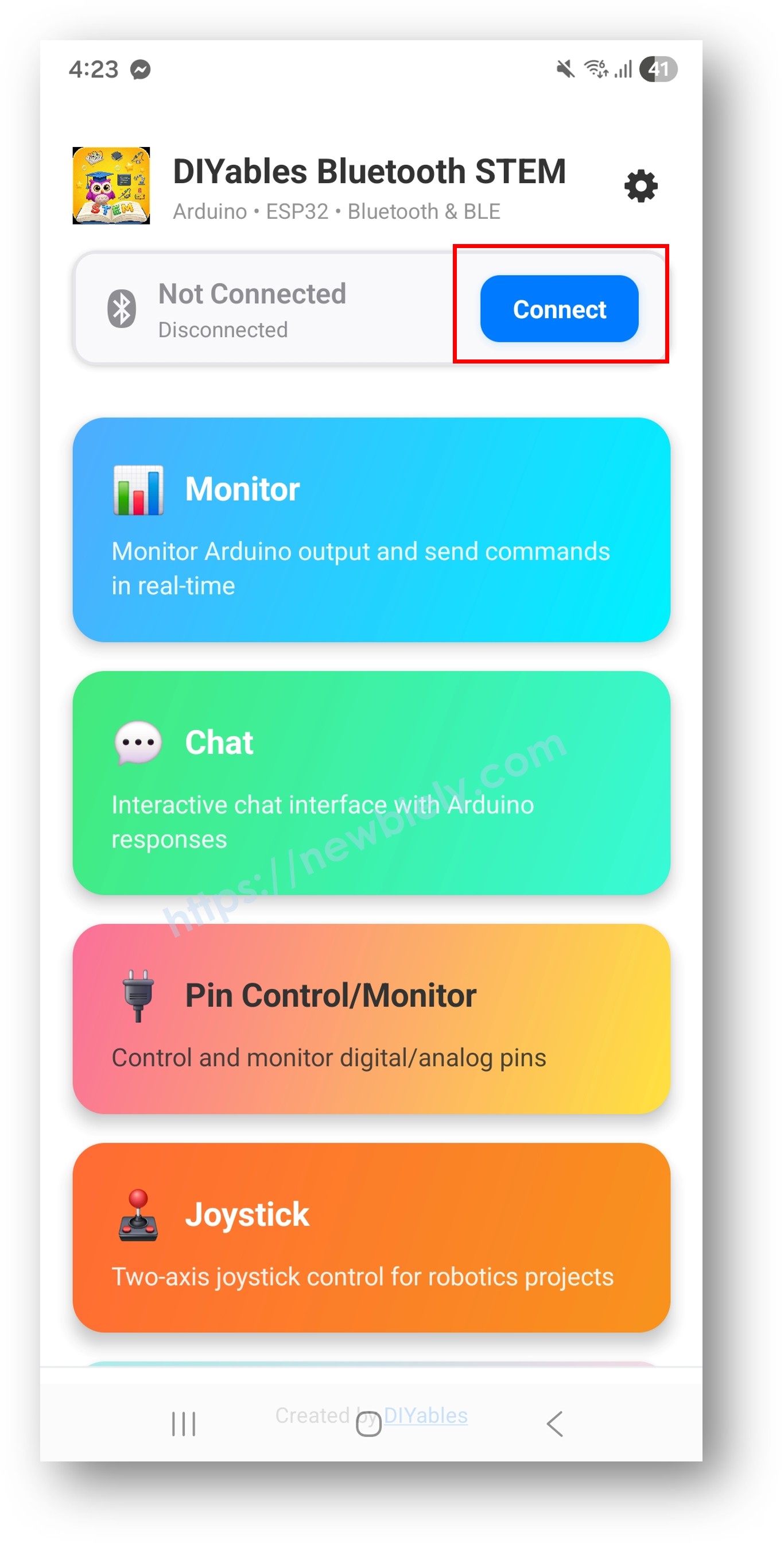
- On the home screen, tap the Connect button. The app will scan for BLE devices.
- Find and tap "Arduino_Rotator" in the scan results to connect.
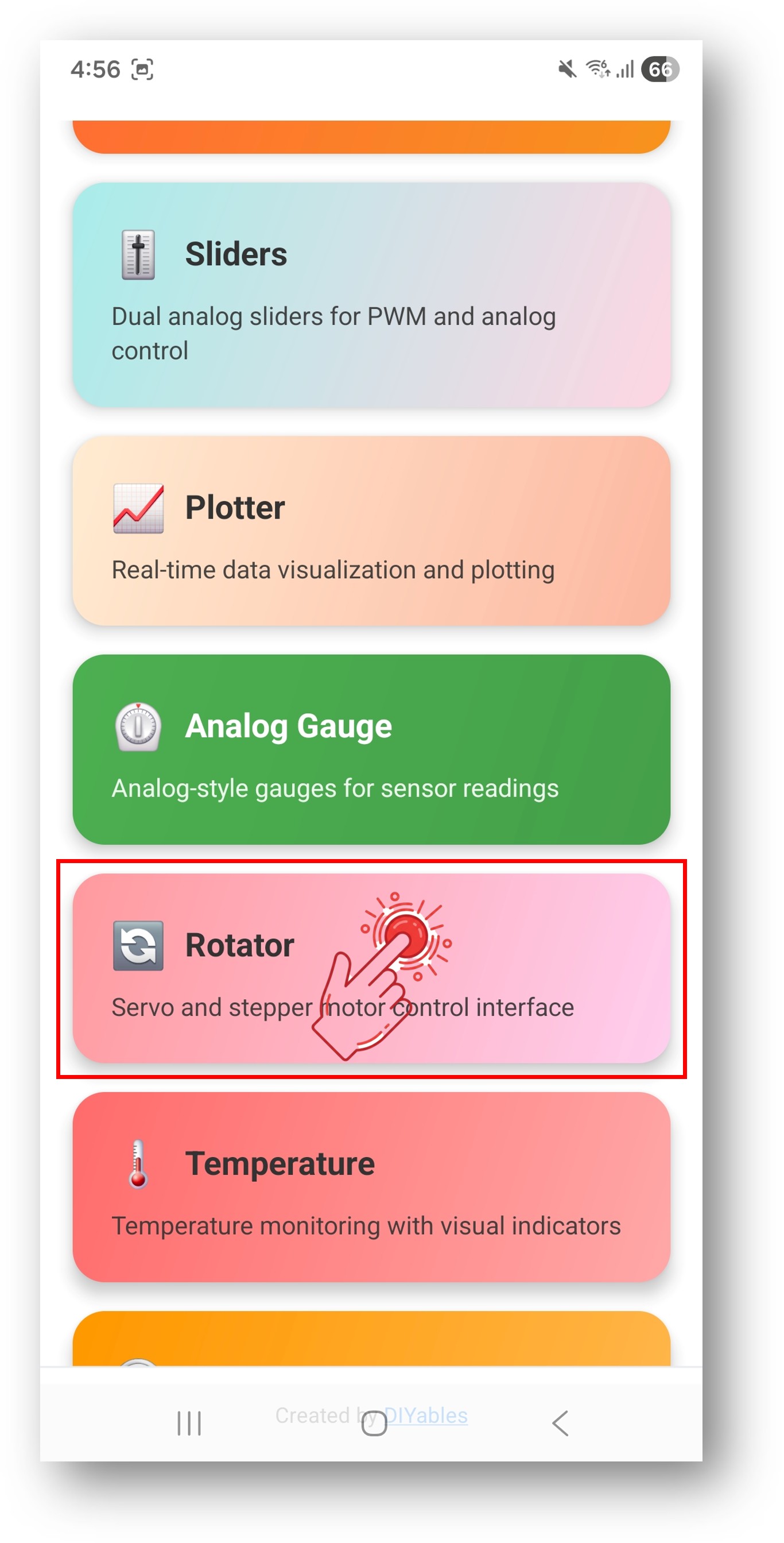
- Once connected, the app automatically goes back to the home screen. Select the Rotator app from the app menu.
Note: You can tap the settings icon on the home screen to hide/show apps on the home screen. For more details, see the DIYables Bluetooth App User Manual.
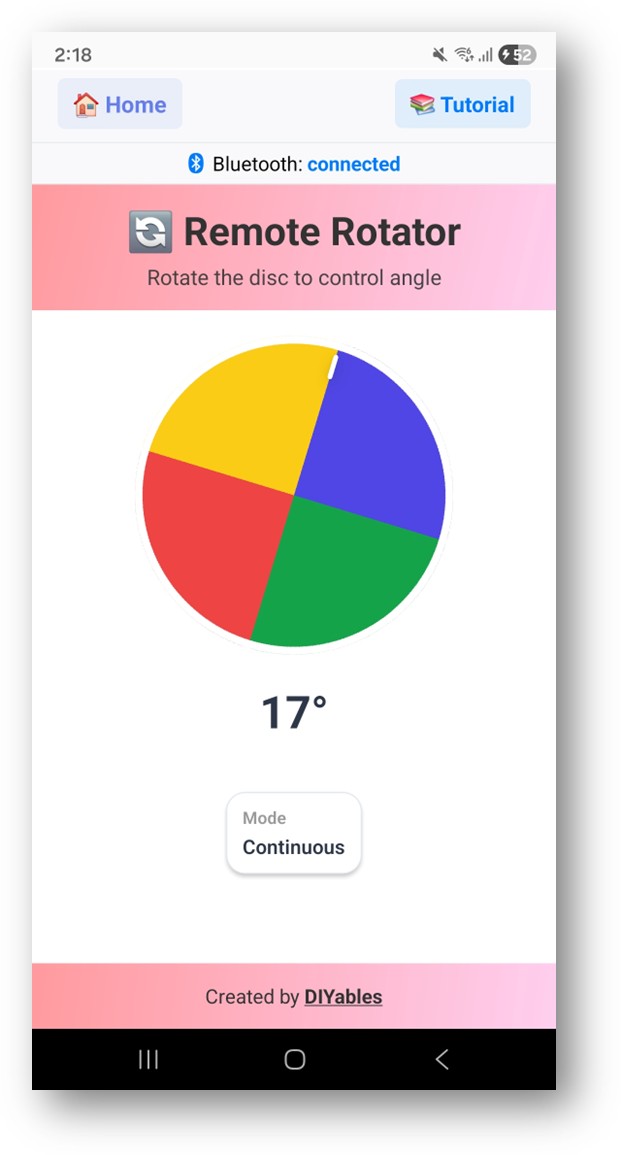
- You will see a rotary dial showing 0° to 180°
- Rotate the dial to send angle values to the Arduino
Now look back at the Serial Monitor on Arduino IDE. You will see:
Creative Customization - Adapt the Code to Your Project
Rotation Modes
Handle Angle Changes
Send Current Angle
Programming Examples
Servo Motor Control
Pan-Tilt Camera Mount
Troubleshooting
Common Issues
1. Cannot find the device in the app
- Make sure the Arduino UNO R4 WiFi is powered on and the sketch is uploaded
- Ensure your phone's Bluetooth is enabled
- On Android 11 and below, also enable Location services
2. Servo not responding
- Verify the servo is wired to the correct pin
- Check that the servo library is included and attach() is called
- Ensure adequate power supply for the servo
3. Angle range seems wrong
- Check the min/max values in the constructor
- Make sure you're using ROTATOR_MODE_LIMITED for bounded range
4. Dial resets to 0 on reconnect
- Send the current angle using sendAngle() when the device reconnects
- The example code handles this in the onRotatorAngle callback
5. Upload fails or board not recognized
- Install the latest Arduino UNO R4 board package via Board Manager
- Try a different USB cable or port
Project Ideas
- Servo motor controller
- Pan-tilt camera mount
- Robotic arm joint control
- Dial-based thermostat control
- Compass/heading display
Next Steps
After mastering the Bluetooth Rotator example, try:
- Bluetooth Slider - For linear value control
- Bluetooth Joystick - For 2D position control
- Bluetooth Analog Gauge - For visual feedback
- Multiple Bluetooth Apps - Combining rotator with other apps
Support
For additional help:
- Check the API Reference documentation
- Visit DIYables tutorials
- Arduino community forums